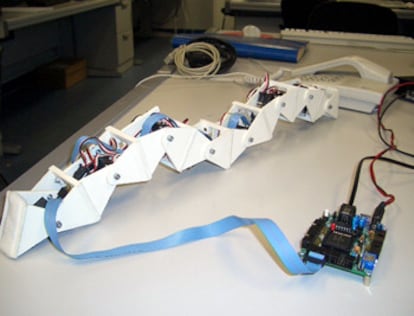
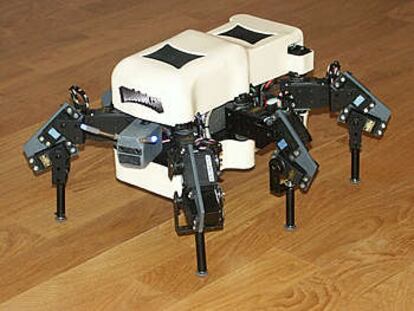
El objetivo del Congreso celebrado en Madrid era poner en com¨˛n los ¨˛ltimos avances en robots caminantes y escaladores. Este ha sido creado por un equipo alem¨˘n, y utiliza un sistema de movimiento pasivo (con ventosas y presi¨®n, sin elementos electr¨®nicos) para trepar por las paredes.ROBERTO PONTICELLIMalanie-III es un robot hex¨˘podo dise?ado por Alejandro
Alonso Puig (IBM). Su finalidad es caminar por terrenos pedregosos, donde los robots habituales de ruedas no pueden llegar. Los robots con patas est¨˘n teniendo un enorme auge
recientemente.ALEJANDRO ALONSOEste ingenio se llama Tudelft y es un robot caminante desarrollado por la Universidad de Delft (Holanda). Las patas son de gran utilidad, pues existen muchos terrenos inaccesibles para los robots con ruedas.Roboclimber, un proyecto europeo, es la estrella del encuentro de rob¨®tica de Madrid. Pesa unos 3.000 kilos y es el robot escalador m¨˘s grande y potente del mundo.Roberto Ponticelli