C¿«mo garantizar la seguridad de robots y veh¿¬culos aut¿«nomos
Los sistemas que controlan estos dispositivos se basan en modelos de í«machine learningí», y requieren nuevas matem¿óticas para estudiar su desempe?o
La ingenier¿¬a de control tiene un papel clave en el funcionamiento y la seguridad de modernas tecnolog¿¬as como los sistemas para que pase de un estado inicial a uno final; por ejemplo, hacer que un dron transporte un objeto desde la f¿óbrica a la casa del comprador. La tarea del controlador consiste en monitorizar el sistema en cada momento ¿Cla posici¿«n del robot¿C y compararlo con el valor deseado. Si es necesario, se genera una acci¿«n para rectificar el sistema y adecuarse a dicho valor. El dise?o de un controlador generalmente requiere un modelo preciso del sistema que permita predecir su comportamiento, y las matem¿óticas son fundamentales para ello.
Los m¿Ğtodos de modelado cl¿ósicos se basan en enfoques param¿Ğtricos, con una estructura fija y un n¿▓mero finito de par¿ómetros. Para ello, debe conocerse a priori la estructura del modelo y estimar los par¿ómetros desconocidos. Por ejemplo, si queremos modelar la aceleraci¿«n de un objeto en funci¿«n de una fuerza externa emplear¿¬amos la ecuaci¿«n fuerza = masa por aceleraci¿«n y solo se estimar¿ó un par¿ómetro desconocido: la masa, para lo que basta con pesar el objeto. Este modelado funciona bien para sistemas simples, como el dise?o de un controlador para control de velocidad y posici¿«n de motores el¿Ğctricos. Adem¿ós, disponemos de herramientas matem¿óticas para garantizar el rendimiento y la estabilidad del sistema controlado, es decir, podemos garantizar que el error entre la posici¿«n deseada y la real del objeto controlado es siempre menor que un valor estipulado.
Sin embargo, en muchos sistemas modernos el modelado cl¿ósico suele ser muy lento o incluso inviable, debido a su complejidad. Por ejemplo, para modelar la interacci¿«n humano-robot ser¿¬a necesario un modelo de todo el sistema, pero no es posible obtenerlo con modelos param¿Ğtricos, ya que es muy complicado estimar los par¿ómetros, debido a su gran n¿▓mero e inaccesibilidad.
Es f¿ócil recopilar datos de proceso gracias a los avances en la tecnolog¿¬a de informaci¿«n y almacenamiento
Por el contrario, es f¿ócil recopilar datos de proceso, medidos de los sistemas, gracias a los avances en la tecnolog¿¬a de informaci¿«n y almacenamiento. Con ellos es posible mejorar el modelado y el control de sistemas complejos, partiendo de un m¿¬nimo conocimiento previo. Adem¿ós, la complejidad de los modelos no param¿Ğtricos crece junto al tama?o del conjunto de datos subyacente y, por lo tanto, no se limita a un n¿▓mero finito de conjunto de par¿ómetros. Este enfoque ha dado resultados muy prometedores en el ¿órea de control en los ¿▓ltimos a?os.
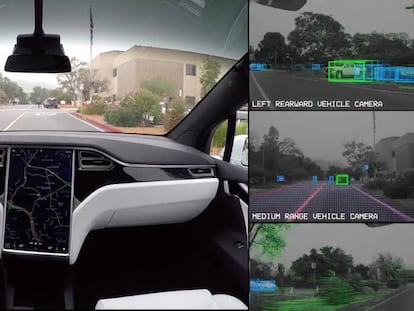
El principal inconveniente de estos m¿Ğtodos es que pueden aparecer resultados impredecibles y no hay garant¿¬as sobre la estabilidad del sistema y las limitaciones de rendimiento. Esto puede suponer problemas de seguridad, que en contextos como la conducci¿«n aut¿«noma y la interacci¿«n con robots no son admisibles. Actualmente el estudio de seguridad para m¿Ğtodos de control no param¿Ğtricos es un campo activo de investigaci¿«n, en el que participan los autores de este art¿¬culo.
En esta incipiente ¿órea juega un papel crucial la probabilidad bayesiana, que permite cuantificar la incertidumbre de los modelos. Esta metodolog¿¬a se fundamenta en el teorema de Bayes, que combina los datos de partida con nueva informaci¿«n obtenida a lo largo del proceso. Los modelos de proceso gaussianos son modelos prometedores, que ya han mostrado buenos resultados para el control de sistemas complejos.Actualmente estamos analizando las propiedades de estos modelos, con el objetivo de extender la aplicaci¿«n y garant¿¬as de seguridad a m¿ós sistemas de control como veh¿¬culos a¿Ğreos y submarinos no tripulados. En el futuro, estas garant¿¬as matem¿óticas rigurosas permitir¿¬an dise?ar sistemas de control basados en procesado de datos con total seguridad.
Thomas Beckers es investigador predoctoral en la Universidad T¿Ğcnica de M¿▓nich.
Sandra Hirche es catedr¿ótica en la Universidad T¿Ğcnica de M¿▓nich.
Leonardo Colombo es investigador postdoctoral Junior Leader Fundaci¿«n í░La Caixaí▒ en el Instituto de Ciencias Matem¿óticas.
Traducci¿«n, edici¿«n y coordinaci¿«n: ?gata A. Tim¿«n Garc¿¬a-Longoria (ICMAT)
Caf¿Ğ y Teoremas es una secci¿«n dedicada a las matem¿óticas y al entorno en el que se crean, coordinado por el Instituto de Ciencias Matem¿óticas (ICMAT), en la que los investigadores y miembros del centro describen los ¿▓ltimos avances de esta disciplina, comparten puntos de encuentro entre las matem¿óticas y otras expresiones sociales y culturales y recuerdan a quienes marcaron su desarrollo y supieron transformar caf¿Ğ en teoremas. El nombre evoca la definici¿«n del matem¿ótico h¿▓ngaro Alfred R¿Ğnyi: "Un matem¿ótico es una m¿óquina que transforma caf¿Ğ en teoremas".
Puedes seguir a Materia en Facebook, Twitter, Instagram o suscribirte aqu¿¬ a nuestra newsletter
Tu suscripci¿«n se est¿ó usando en otro dispositivo
?Quieres a?adir otro usuario a tu suscripci¿«n?
Si contin¿▓as leyendo en este dispositivo, no se podr¿ó leer en el otro.
FlechaTu suscripci¿«n se est¿ó usando en otro dispositivo y solo puedes acceder a EL PA?S desde un dispositivo a la vez.
Si quieres compartir tu cuenta, cambia tu suscripci¿«n a la modalidad Premium, as¿¬ podr¿ós a?adir otro usuario. Cada uno acceder¿ó con su propia cuenta de email, lo que os permitir¿ó personalizar vuestra experiencia en EL PA?S.
?Tienes una suscripci¿«n de empresa? Accede aqu¿¬ para contratar m¿ós cuentas.
En el caso de no saber qui¿Ğn est¿ó usando tu cuenta, te recomendamos cambiar tu contrase?a aqu¿¬.
Si decides continuar compartiendo tu cuenta, este mensaje se mostrar¿ó en tu dispositivo y en el de la otra persona que est¿ó usando tu cuenta de forma indefinida, afectando a tu experiencia de lectura. Puedes consultar aqu¿¬ los t¿Ğrminos y condiciones de la suscripci¿«n digital.