Robots que sienten lo que tocan
El tacto es esencial en la relaci¿«n de los humanos con su entorno. Tambi¿Ğn entre robots y creadores. Un proyecto europeo liderado desde la Universidad de Bolonia ense?a a las m¿óquinas a distinguir lo que palpan para aplicar la fuerza adecuada
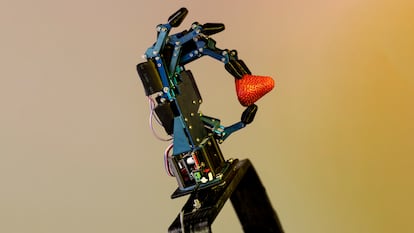
El famoso antrop¿«logo Ashley Montagu escribi¿« hace muchos a?os que í░la comunicaci¿«n que transmitimos con el tacto constituye el medio m¿ós poderoso de establecer relaciones humanasí▒. Y aqu¿¬ est¿ón, un d¿¬a de primeros de mayo de 2023, un grupo de investigadores de la Universidad de Bolonia tratando de proporcionar el sentido del tacto a una m¿óquina. Est¿ón usando dos tecnolog¿¬as para darle a una mano rob¿«tica dos tipos distintos de sensibilidad: una, un poco m¿ós de trazo grueso, que cubrir¿ó la mayor parte de la superficie de la palma, y otra que le ofrecer¿ó una informaci¿«n mucho m¿ós rica y completa sobre la dureza, la aspereza o suavidad de los objetos, como la que nos transmiten las yemas de los dedos, y que el aparato tendr¿ó precisamente ah¿¬.
Hoy, en el Laboratorio de Rob¿«tica de la Facultad de Ingenier¿¬a, la investigadora predoctoral Alessandra Bernardini no solo se afana con infinita paciencia en explicar a los visitantes c¿«mo funciona esto ¿▓ltimo í¬se colocan unos peque?os sensores semiesf¿Ğricos, de un material maleable parecido a la goma, que env¿¬an al ordenador informaci¿«n sobre las propiedades del objeto que sujetaí¬, sino que est¿ó dispuesta a renunciar a dos de las fresas que ha tra¿¬do para el almuerzo para ilustrar la demostraci¿«n. A medida que la mano rob¿«tica va apretando el fruto rojo, los fototransmisores de los sensores traducen las perturbaciones de la goma en datos que se muestran en la pantalla en forma de gr¿óficos de l¿¬neas que se juntan y se separan.
Junto a ella, Roberto Meattini, otro miembro del equipo, contin¿▓a con la demostraci¿«n. Una vez que tiene bien sujeta a su mu?eca derecha una estructura rectangular í¬en un extremo hay un hueco para meter la mano y en el contrario est¿ó acoplado el prototipo rob¿«ticoí¬, comienza a encoger y a extender lentamente los dedos. Lo que est¿ó haciendo, con la ayuda de Bernardini a los mandos del ordenador, es ense?ar a la pr¿«tesis a leer los movimientos de los m¿▓sculos del antebrazo que dirigen lo que hace su mano, para poder despu¿Ğs repetirlos; una pulsera colocada un poco m¿ós abajo del codo es la encargada de recoger y transmitir esa informaci¿«n al robot a trav¿Ğs de unos sensores inal¿ómbricos.

Los dos ingenieros, junto a otra media docena de compa?eros y liderados por el profesor Gianluca Palli, est¿ón dando apenas los primeros pasos del proyecto IntelliMan, formado por un consorcio de 13 universidades, empresas y centros de investigaci¿«n de seis pa¿¬ses europeos, con el objetivo de desarrollar un nuevo sistema de manipulaci¿«n impulsado por inteligencia artificial que permita a los robots (ya sean pr¿«tesis como la mano que hemos visto o m¿óquinas independientes) aprender tanto del entorno como de la interacci¿«n con las personas. La Comisi¿«n Europea lo ha elegido entre los 42 primeros proyectos de inteligencia artificial y rob¿«tica lanzados dentro del programa Horizon Europe, el gran plan de investigaci¿«n e innovaci¿«n del continente. Han sido seleccionados por su potencial para í░mejorar la sociedad en que vivimos, abordando importantes desaf¿¬os tecnol¿«gicosí▒, seg¿▓n el documento que recopila las iniciativas. Entre las elegidas hay desde un gran centro que tratar¿ó de garantizar la seguridad en la investigaci¿«n en inteligencia artificial hasta propuestas para la recuperaci¿«n de agua, de reciclaje o de desarrollo de drones para apoyar a los trabajadores del campo y a empleados de mantenimiento de infraestructuras en lugares peligrosos.
En el caso IntelliMan, el profesor Palli explica en su despacho de la hist¿«rica ciudad italiana qu¿Ğ frutos tratar¿ón de obtener de los 4,5 millones de euros que recibir¿ón de la Comisi¿«n entre septiembre de 2022 y febrero de 2026. En primer lugar, su objetivo es crear extremidades prost¿Ğticas con las que sus due?os sean capaces de abordar f¿ócilmente sus actividades cotidianas, como sujetar un vaso o abrir una puerta o un caj¿«n. El siguiente paso ser¿ó transmitir esas capacidades a una m¿óquina independiente que se pueda convertir m¿ós pronto que tarde en un asistente rob¿«tico del hogar que ponga solito el lavavajillas o recoja la mesa despu¿Ğs de comer. La idea es que puedan interactuar con las personas, pero que nadie se imagine todav¿¬a charlando con ellos; se trata de ense?arles tareas nuevas í¬mostr¿óndoles una vez c¿«mo hacerlo, para que luego las repitaní¬, pero que, adem¿ós, sean capaces de adaptar ese trabajo aprendido a un contexto cambiante: un obst¿óculo en el camino que antes no estaba ah¿¬, un objeto m¿ós resbaladizo que el anterior.
Para eso necesitan el sentido de la vista í¬que se puede resolver con c¿ómaras y sensoresí¬ y el m¿ós complicado del tacto, en el que est¿ón trabajando. Pero no solo para d¿órselo a la m¿óquina, sino tambi¿Ğn para que, en el caso de las pr¿«tesis, estas se lo hagan sentir tambi¿Ğn, de alg¿▓n modo, a la persona que las utiliza: í░Por ejemplo, estamos trabajando en transmitir la fuerza de agarre por medio de motores vibrot¿óctiles, que son peque?os motores que vibran a diferente amplitud de frecuencia [dependiendo de si esa fuerza es mayor o menor]í▒, explica Meattini, de vuelta en el laboratorio. í░Es algo que ni siquiera las pr¿«tesis m¿ós avanzadas del mercado hacen todav¿¬aí▒, a?ade.

Los investigadores se mueven en un espacio en el que hay ordenadores y modernos prototipos de maquinaria puntera, pero tambi¿Ğn muchos cables, cartones, alg¿▓n rollo de cinta aislante y un gran mueble met¿ólico del que los ingenieros van sacando todo tipo de herramientas grandes, medianas y peque?as. Junto a ese mundo de tecnolog¿¬a ultramoderna, blanca y as¿Ğptica, de formas arm¿«nicas y redondeadas que preside nuestro imaginario colectivo, este laboratorio recuerda que los avances í¬al menos una parte y al menos en parteí¬ siguen ocurriendo en lugares llenos de enchufes y de ¿óngulos que pinchan, con objetos que hay que tocar para ensamblar y que hay que probar una y otra vez para encontrar la manera de que funcionen. Unos lugares donde se entremezclan estudiantes, doctorandos, investigadores en ciernes con otros ya consagrados, que trabajan en proyectos simult¿óneos que confluyen y a veces se solapan. Donde, quiz¿ó precisamente por todo eso, resulta fundamental descomponer cada objetivo en tareas m¿ós peque?as para hacerlos manejables e ir avanzando pasito a pasito, pero sobre pelda?os firmes, hacia el resultado final.
Ahora mismo, en lo que se refiere a IntelliMan, los ingenieros que forman el grupo bolo?¿Ğs est¿ón concentrados en comprender c¿«mo funciona un agarre rob¿«tico: primero hay que llegar al objeto; luego, establecer el contacto y entender el contexto en que est¿ó establecido para saber si puede aumentar o no la fuerza de agarre, explica Meattini. Todo esto se puede hacer de distintas maneras, la m¿ós cl¿ósica de las cuales es crear modelos matem¿óticos que describan c¿«mo ese proceso puede acometerse y repetirse sin fallo alguno. í░El problema con esto es que, en teor¿¬a, funciona perfectamente, pero en la vida real no sabes exactamente d¿«nde va a tocar, c¿«mo va a hacerloí¡ As¿¬ que estamos trabajando en un enfoque diferente, de inteligencia artificial basada en probabilidades, de modo que podamos tomar las medidas del sensor y describirlas en nuestro modelo probabil¿¬stico y que este nos diga c¿«mo deber¿¬a ser el agarre. El mundo real es probabil¿¬stico, no es como una f¿«rmulaí▒, a?ade el investigador.
Ese mundo real í¬con sus fallos, sus obst¿óculos imprevistos y sus ins¿«litas solucionesí¬ est¿ó muy presente en esta investigaci¿«n, en forma de trabajadores de f¿óbricas que explican los secretos escondidos de sus funciones y de personas con amputaciones que les cuentan a los cient¿¬ficos qu¿Ğ necesitan exactamente de una pr¿«tesis para que realmente les resulte ¿▓til y nos les estorbe (el centro de rehabilitaci¿«n especializado que el Instituto Nacional para la Prevenci¿«n de los Accidentes del Gobierno italiano tiene cerca de Bolonia, en Budrio, forma parte del consorcio). Pero tambi¿Ğn est¿ó muy presente í¬de hecho, est¿ó en la base de todo este esfuerzo colectivoí¬ esa idea de buscar aproximaciones distintas a viejos problemas. Por ejemplo, el que supone no solo que la m¿óquina sienta lo que ocurre alrededor, sino, sobre todo, que sepa qu¿Ğ hacer despu¿Ğs con esa informaci¿«n, algo que est¿ón intentando resolver í░mezclando dos enfoques que ya est¿ón completamente establecidos, pero cuya conexi¿«n todav¿¬a estamos investigandoí▒, destaca Palli. Y se detiene en la explicaci¿«n, pues es una de las grandes singularidades de su proyecto.

Por un lado est¿ón los m¿Ğtodos m¿ós cl¿ósicos, que consisten en mapear y preconfigurar toda la actividad que va a desarrollar el robot en un tiempo y en un espacio, es decir, que va a coger un objeto concreto en un punto y lo va a dejar en otro. í░Es dif¿¬cil aplicar estas soluciones en la pr¿óctica si no tienes absolutamente toda la informaci¿«n del contexto en que se mueveí▒, se?ala, lo cual es sencillamente imposible en el momento en que entra en juego la impredecibilidad de la vida cotidiana y de la interacci¿«n con personas. Lo que nos lleva al segundo posible enfoque, el fundamental del machine learning y la inteligencia artificial: recopilar una cantidad gigantesca de informaci¿«n de contexto que se le da a la m¿óquina a trav¿Ğs de millones de ejemplos para que aprenda c¿«mo se hace algo. Este tambi¿Ğn tiene una gran limitaci¿«n, seg¿▓n Palli: requiere tal cantidad de pruebas, tal cantidad de datos, que quiz¿ó sea posible de recopilar si est¿ós investigando, por ejemplo, en el campo de la econom¿¬a, sobre la que hay infinidad de referencias disponibles; pero para una aplicaci¿«n rob¿«tica como la que ellos tienen en mente ni existe ni est¿ó al alcance, ya que recoger esa informaci¿«n es muy caro: hace falta tiempo, equiposí¡
í░De alguna manera, estamos tratando de definir cu¿ól es el plan del robot y, a partir de la base de muy pocos experimentos, recopilar los datos suficientes para que adapte el plan a las condiciones reales del entorno. Pero, adem¿ós, queremos que el ser humano, la persona, est¿Ğ activamente presente en ese entorno, que interact¿▓e con ¿Ğl, que tambi¿Ğn le ense?eí▒, resume finalmente el coordinador del proyecto.
Palli, de 46 a?os, habla con el aplomo de quien lleva varios lustros buscando soluciones para crear robots m¿ós completos e independientes y lo hace desde una instituci¿«n que fue pionera en este campo; en concreto, en el desarrollo de manos rob¿«ticas antropom¿«rficas que fueran cada vez m¿ós fiables, sencillas y baratas. Su historia se puede repasar a trav¿Ğs de los prototipos expuestos en varias vitrinas en el laboratorio de rob¿«tica de la universidad: desde el primero, financiado en 1988 por IBM Italia í¬un rudimentario dispositivo con dos dedos paralelos y un pulgar opuesto controlados por m¿▓sculos artificiales, tendones alimentados con varios motores y un sistema de calculadoras y equipos electr¿«nicosí¬, hasta uno de los m¿ós recientes: una mano rob¿«tica, movida por un espectacular brazo con transmisi¿«n de tendones de cuerda trenzada, con la que los investigadores ya empezaron a dar los primeros pasos para introducir sensores t¿óctiles. Sobre toda esa base de conocimiento previo í¬gracias a todo lo que se consigui¿«, pero tambi¿Ğn gracias a todo lo que se fue descartando por el caminoí¬ se avanza ahora hacia una nueva generaci¿«n.

El proyecto que dirige Palli va, en todo caso, mucho m¿ós all¿ó de la mano rob¿«tica y de las pr¿«tesis en general. No solo por los robots dom¿Ğsticos, sino por las aplicaciones para la industria en las que est¿ón trabajando. Por un lado, colaboran con la cadena brit¿ónica de supermercados online Ocado en un robot que sea capaz de sacar frutas de una caja grande para colocarlas en otras m¿ós peque?as, para lo cual es importante que pueda cambiar la fuerza de agarre dependiendo de si lo hace con manzanas, con naranjas o fresas. Adem¿ós, intentan algo todav¿¬a m¿ós dif¿¬cil para la industria automovil¿¬stica (la empresa de componentes eslovena Elvez es otro de los socios del consorcio): ensamblar cables y conectores, es decir, materiales deformables cuya manipulaci¿«n requiere unas destrezas bastante finas.
Est¿ón en ello. Y el pr¿«ximo salto adelante depender¿ó de la ruptura de barreras en muchos campos de la ciencia: desde las matem¿óticas í¬para representar de la mejor manera el plan preasignado de los robots y c¿«mo percibe su entornoí¬ hasta los desarrollos tecnol¿«gicos paralelos í¬los sensores de tacto est¿ón todav¿¬a en proceso de avance y mejoraí¬. Pero a Palli le preocupa especialmente c¿«mo puede ser la interacci¿«n entre m¿óquina y humano, para lo cual el proyecto cuenta con el apoyo de un equipo de psic¿«logos.
El papel que desempe?e el tacto en ese camino depender¿ó en gran medida de su desarrollo, de momento muy rudimentario. Pero no olvidemos las palabras del antrop¿«logo brit¿ónico estadounidense Ashley Montagu sobre el poder de este sentido, quiz¿ó el m¿ós complejo de todos, para la comunicaci¿«n humana. En su libro cl¿ósico El tacto: la importancia de la piel en las relaciones humanas, el profesor de la Universidad de Princeton fallecido en 1999 hac¿¬a tambi¿Ğn afirmaciones como estas: í░En la evoluci¿«n de los sentidos, el tacto fue, sin duda, el primero en existir. El tacto es el padre de nuestros ojos, o¿¬dos, nariz y boca. [í¡] como Bertrand Russell se?al¿« tiempo atr¿ós, es el sentido que nos proporciona sensaci¿«n de realidad. í«No solo nuestra geometr¿¬a y nuestra f¿¬sica, sino toda concepci¿«n de lo que existe fuera de nosotros est¿ó basada en el sentido del tactoí▒.

í░Estoy de acuerdo en que el tacto ser¿ó cada vez m¿ós importante, porque es lo que cambia completamente el juego cuando interact¿▓as con los objetos y el entorno. Creo que abrir¿ó realmente la capacidad de los robots para interactuar con el entorno de una manera efectivaí▒, opina Palli. De momento, en todo caso, lo que ¿Ğl y su equipo proponen para que la relaci¿«n entre humano y m¿óquina funcione bien es una especie de autonom¿¬a compartida, en la que la persona que empieza a relacionarse con la m¿óquina la trata como a un ni?o al que tiene que ir ense?ando y d¿óndole poco a poco m¿ós margen para tomar sus propias decisiones. í░Eso significa que el robot parte de un punto en el que depende completamente del humano, porque no sabe c¿«mo hacer algo. Y as¿¬ el humano le ense?ar¿ó qu¿Ğ hacer, lo que le da al robot m¿ós autonom¿¬a, porque podr¿ó hacerlo en lo sucesivo de forma independienteí▒, explica el investigador. Ese proceso ayudar¿ó, adem¿ós, a que la persona conf¿¬e en el robot.
Cuando a Roberto Meattini le preguntan en un contexto social a qu¿Ğ se dedica, suele elegir la versi¿«n corta: í░Trabajo en la interacci¿«n de robots y humanos; estudio c¿«mo conectar a los humanos con los robots y viceversaí▒. Porque insiste en que no se trata de crear robots, sino de esa relaci¿«n, que es de hecho lo que sustenta las bases te¿«ricas de las principales disciplinas sobre la ingenier¿¬a de sistemas autom¿óticos con la que trabajan, explica este ingeniero que mencion¿« en su tesis doctoral aquel robot de juguete que le regalaron sus padres en su quinto cumplea?os. Tambi¿Ğn est¿ó convencido de la importancia del tacto en el camino de mejora: í░La capacidad de sentir y responder al tacto permitir¿ó a los robots no solo realizar mejor las tareas de manipulaci¿«n y las operaciones aut¿«nomas, sino tambi¿Ğn comprender las intenciones humanas y ser ¿▓tiles para sus necesidades, lo que conducir¿ó a interacciones m¿ós intuitivas y efectivasí▒.
Suena bien, sin duda. Pero llegados a este punto, por mucho que estemos hablando de robots con capacidades en principio b¿ósicas, resulta inevitable enfrentarse a los temores que afloran cada vez con mayor violencia en torno a las posibles consecuencias indeseadas del desarrollo de inteligencia artificial; al fin y al cabo, estamos hablando de robots capaces de aprender cosas nuevas. í░Nosotros aplicamos principios ¿Ğticos a toda nuestra investigaci¿«ní▒, responde Palli cuando se le plantea el asunto. Pero, ?tienen en mente la idea de transmitir alg¿▓n tipo de ¿Ğtica a los robots? í░No, en principio no estamos en eso. Estamos trabajando en la seguridad, que todo el trabajo que hagan lo hagan con seguridadí▒, responde. Y a?ade: í░Podr¿¬amos decir que estamos trabajando en un requisito ¿Ğtico muy b¿ósicoí▒.
Tu suscripci¿«n se est¿ó usando en otro dispositivo
?Quieres a?adir otro usuario a tu suscripci¿«n?
Si contin¿▓as leyendo en este dispositivo, no se podr¿ó leer en el otro.
FlechaTu suscripci¿«n se est¿ó usando en otro dispositivo y solo puedes acceder a EL PA?S desde un dispositivo a la vez.
Si quieres compartir tu cuenta, cambia tu suscripci¿«n a la modalidad Premium, as¿¬ podr¿ós a?adir otro usuario. Cada uno acceder¿ó con su propia cuenta de email, lo que os permitir¿ó personalizar vuestra experiencia en EL PA?S.
?Tienes una suscripci¿«n de empresa? Accede aqu¿¬ para contratar m¿ós cuentas.
En el caso de no saber qui¿Ğn est¿ó usando tu cuenta, te recomendamos cambiar tu contrase?a aqu¿¬.
Si decides continuar compartiendo tu cuenta, este mensaje se mostrar¿ó en tu dispositivo y en el de la otra persona que est¿ó usando tu cuenta de forma indefinida, afectando a tu experiencia de lectura. Puedes consultar aqu¿¬ los t¿Ğrminos y condiciones de la suscripci¿«n digital.
Sobre la firma